
學習目標 : 利用faya電子積塊組出具有動力指針的的指北羅盤
學習時間 : 240min
使用模組 : (1) faya brickNano
(2) faya 步進馬達模組
(3) faya 電子羅盤模組
(4) faya 光感應模組
工具 : 樂高積木(相容)
一字螺絲起子
====================相關知識====================
這篇文章中所用到的模組使用方式及相關知識整理如下,需進一步了解時可點進去參考:
模組介紹 : faya brickNano
模組介紹 : faya 步進馬達模組
模組介紹 : faya 電子羅盤模組
模組介紹 : faya 光感應模組
======================開箱======================
動力羅盤(型號NTG-507)是fayalab的第七款創意組合作品,此作品的目標是利用現有的faya模組,配合Arduino程式,組出一個能夠自我校正功能的指北羅盤,當作品通上電源後,羅盤上的步進馬達會帶動指針自動校正位置,之後馬達上的指針會持續指向北方。
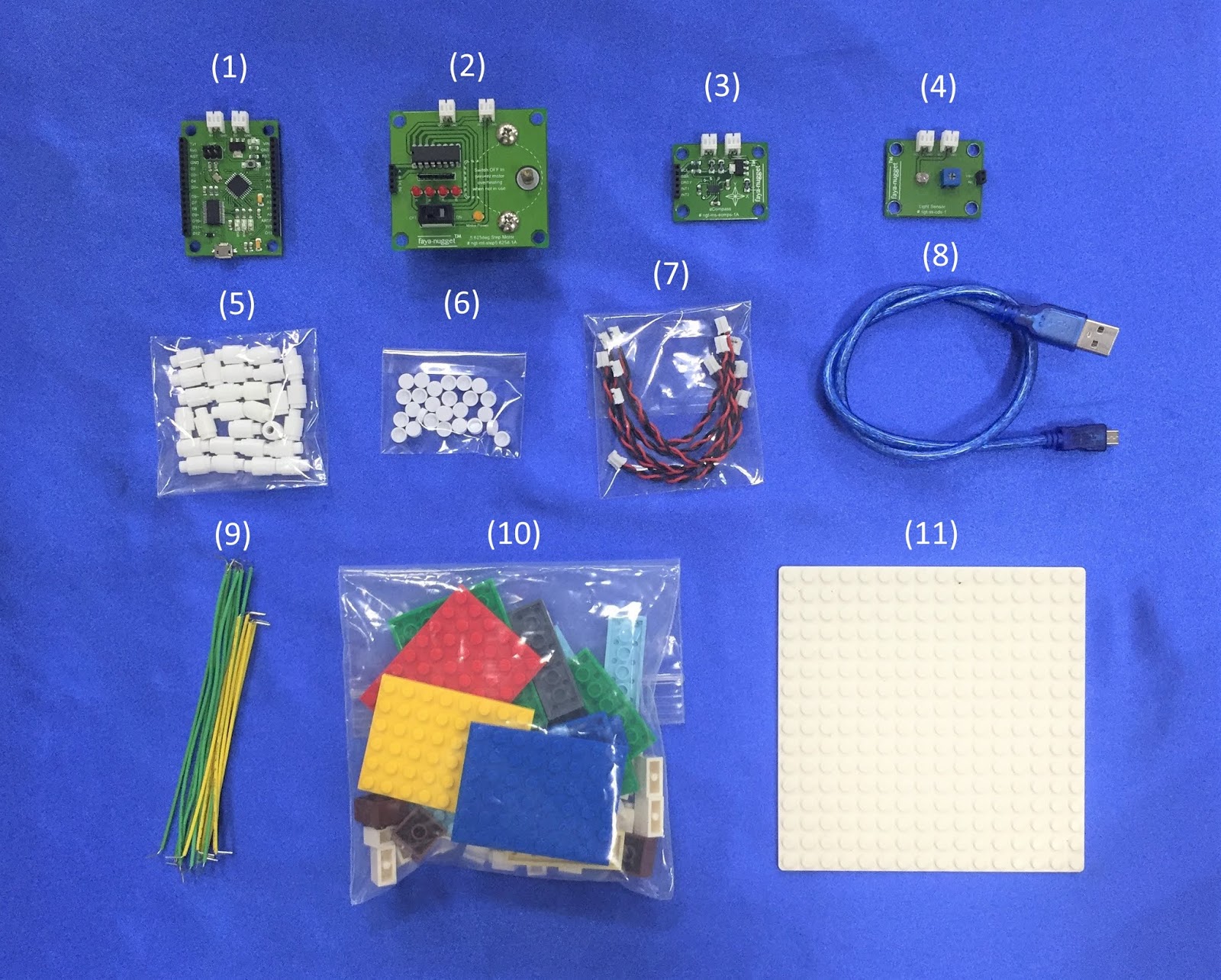
盒內包含了製作動力羅盤所需的全部模組及附件:
1.faya brickNano 2.步進馬達模組 3.電子羅盤模組 4.光感應模組
5.積木柱子 6. 積木蓋子 7. 電源線(B) 8. micro USB傳輸線
9. 跳線組 10. 積木組 11. 積木底板
===================範例實作=====================
目標:
(1) 利用faya電子積塊,製作出指北針功能的羅盤
(2) 透過光感應器模組校正步進馬達位置
(3) 透過電子羅盤模組定位方向
(4) 透過步進馬達帶動指針指向北方
組裝:
首先把 [1.faya brickNano]、[2.步進馬達模組]、[3.電子羅盤模組]、[4.光感應模組]的四個角落裝上[5.積木柱子]。
積木柱子的組裝過程可參考[功能介紹 : faya電子積塊與LEGO積木的結合]

接著把 [1.faya brickNano]、[2.步進馬達模組]、[4.光感應模組]的四個積木柱子上方,裝上[6. 積木蓋子],注意[3.電子羅盤模組]不需要裝積木蓋子。
積木蓋子的組裝過程可參考[小技巧 : 積木柱子太鬆時如何處理?]

最後在[2.步進馬達模組]的軸上,裝上一個[5.積木柱子]。

接下來示範線路的連接和積木的組裝,因為這次的作品牽涉到馬達定位的問題,模組位置須配合程式,因此大家可以按照底下的範例跟著做一次,熟悉系統運作的方式後,再按照自己的喜好修改造型。如果照著我們的範例,組完後會長這個樣子:
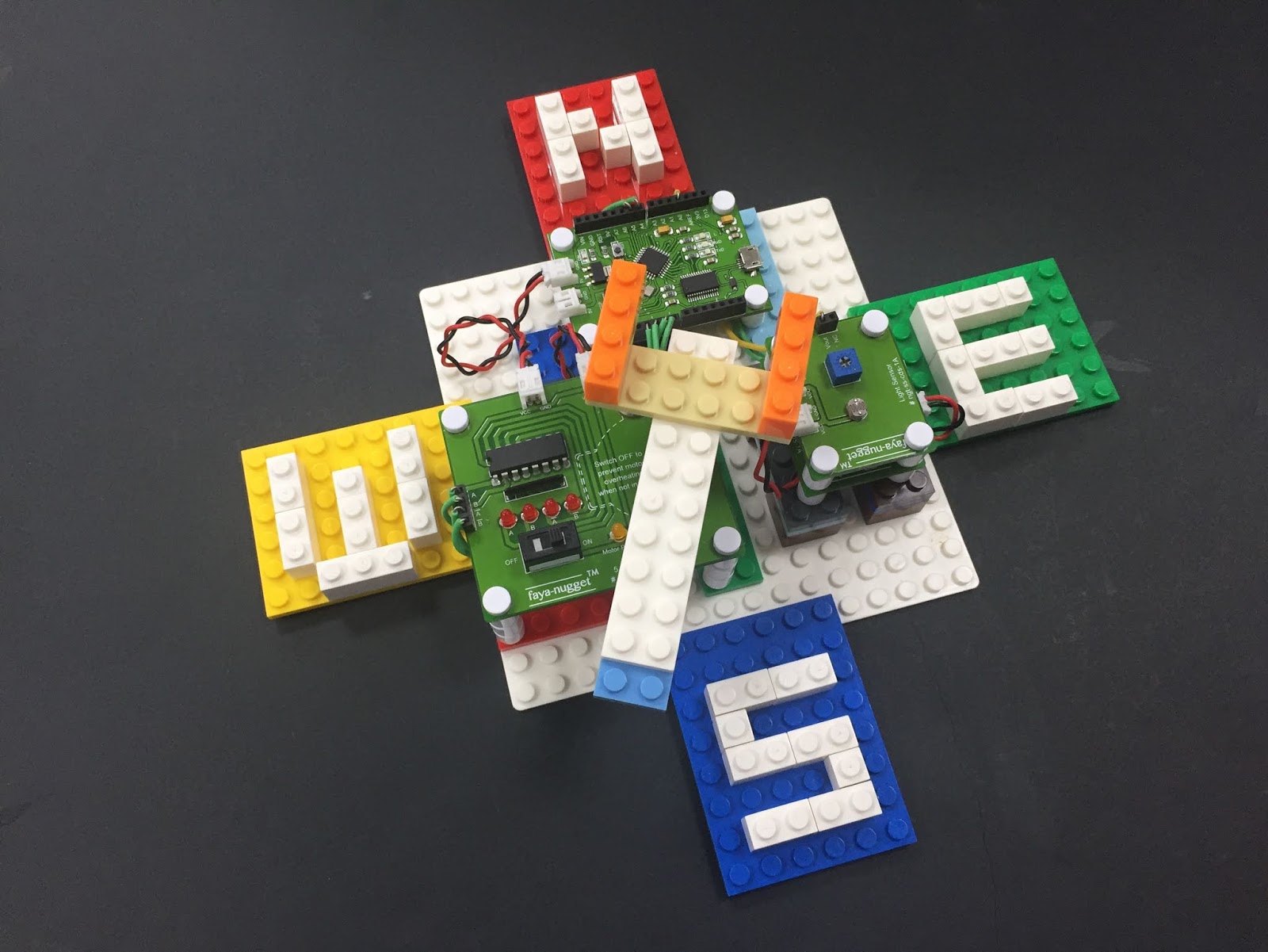
首先將[10. 積木包] 裡面的積木,利用1x1,1x2,1x4在6x8的平板上組出東南西北的四個英文簡寫,[E] [S] [W] [N]
東- East [E]

南 - South [S]

西 - West [W]

北 - North [N]

接著我們要組馬達上的指針,步驟如下
(1) 將兩個2x10平板以一格之差相疊

(2) 在尾巴的地方裝上一個2x6的平板

(3) 在2x6平板上裝上兩個1x4的積木,使其有尾翼的感覺

接下來拿出16x16的底板,在以下的位置,安裝2x6的平板和2x2的一般積木

完成後如下圖所示

接著在2x2積木上跨上2x6平板,每邊各兩層,如下所示

再來我們將剛剛組成的東南西北四個字,併到底版的四周如下所示

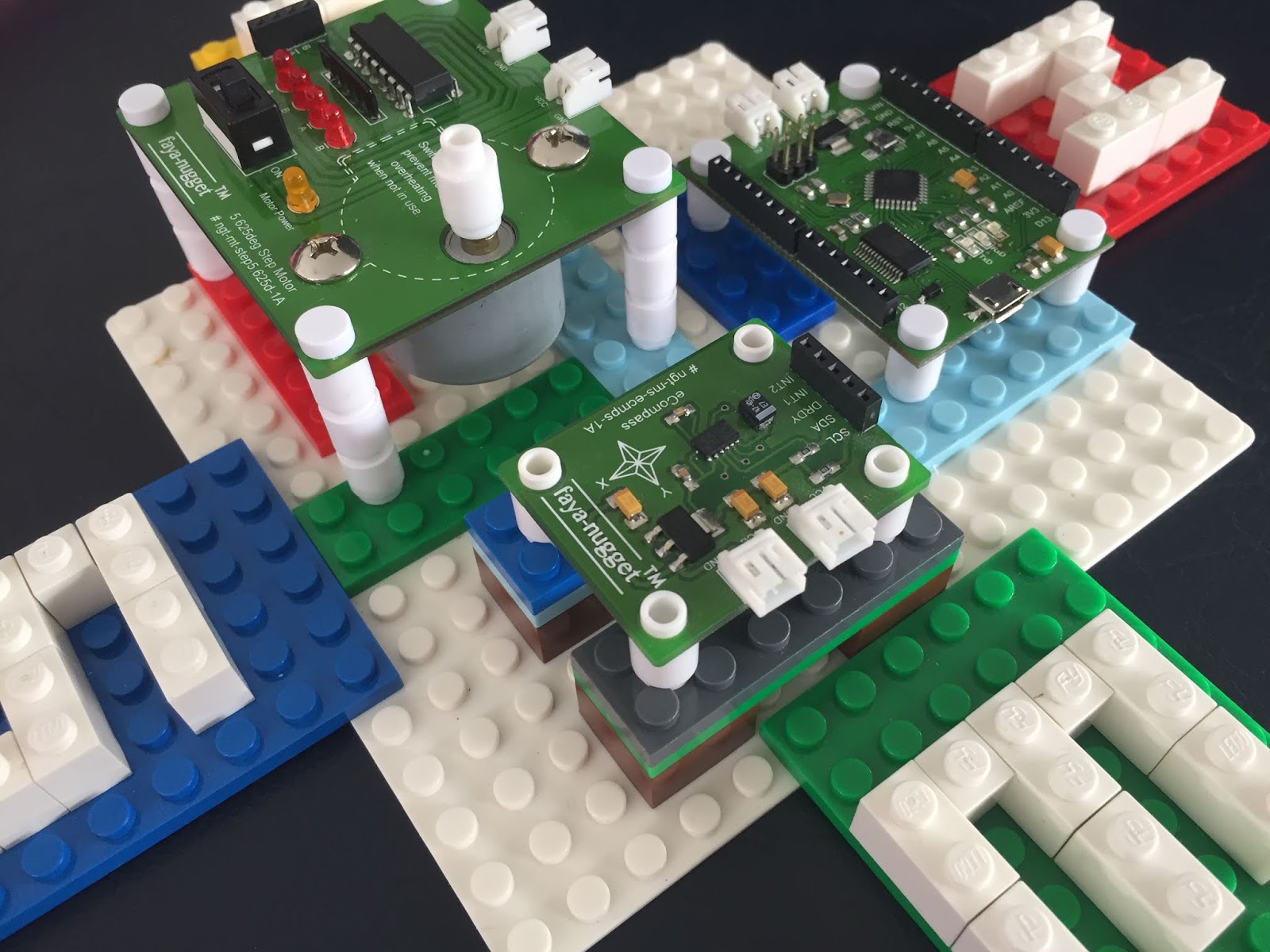
接著在以下用圓點標註的地方安裝相關模組:
(1) 紫色圓點為brickNano的位置
(2) 綠色圓點為步進馬達模組的位置
(3) 黃色圓點為 電子羅盤模組的位置
安裝方向請參考底下第二張圖,注意到光感測器模組還不需要安裝


從另一個角度看模組安裝的位置
連接訊號與電源線
首先連接訊號線,請利用[9.跳線組]完成Arduino和模組之間的訊號連接
步進馬達模組:
Arduino_D2 ===> 步進馬達模組_A
Arduino_D3 ===> 步進馬達模組_B
Arduino_D4 ===> 步進馬達模組_/A
Arduino_D5 ===> 步進馬達模組_/B
注意我們把訊號線繞到模組下方保持美觀

Arduino_A4 ===> 電子羅盤模組_SDA
Arduino_A5 ===> 電子羅盤模組_SCL

接著連接電源線,請利用[7.電源線(B)]連結模組間的電源座,連接的詳細說明可參考這篇文章 或簡易版。
首先連接brickNano和步進馬達間的電源線

接著我們先安裝光感應模組,利用四個模組的柱子將它直接疊在電子羅盤模組上方,請特別注意其方向。

完成後利用電源線把電源從步進馬達連到光感應模組

再把電源從光感應模組連到下方的電子羅盤模組,完成電源線的連接。

最後連接光感應模組的訊號線
Arduino_A0 ===> 光感應模組_Vout 
安裝指針:
拿出剛開始製作好的指針,翻到背面,記住下圖箭頭所指的第二個孔位位置

將此孔位扣在步進馬達模組上的積木柱子上,完成後如下圖所示,完成硬體的組裝部分。

校正指針位置:
本段介紹如何透過光感應模組與步進馬達模組進行位置校正,首先複習一下我們在[模組介紹 : faya 電子羅盤模組]介紹到:電子羅盤模組上的標示,Y字樣的方向代表晶片方位的南方(S),X字樣的方向代表晶片方位的西方(W),因此-X的方向為晶片方位的東方(E),-Y的方向為晶片方位北方(N)。

在文章中我們提到透過.heading()指令,能夠利用I2C介面輸出[晶片北方]與[磁北方]的夾角,因此如果輸出顯示23度,代表-Y和磁北方相差23度 (順時),如果顯示0度,代表現在-Y正指著磁北方。
如果我們能讓步進馬達指針在開機後自動跑到-Y的位置,透過電子羅盤模組的輸出得到和磁北方的角度差,我們就可以反推回去,把指針指向磁北方。
因此我們必須思考如何讓步進馬達的指針開機後能自動指到-Y的方向,答案就是透過一個光感應模組,解釋如下:
首先注意到電子羅盤模組的安裝方向如下圖所示,對於羅盤指針而言,如果指向圖中的右方三點鐘方向,代表指針指向[晶片南方],如果羅盤指針指向九點鐘方向,代表指針指向[晶片北方位]。

由於每個環境的光源強度不同,因此我們必須先校正光感應模組的敏感度,讓程式容易判斷。底下範例程式我們一邊讓馬達順時針旋轉到光感應模組的位置,一邊讀取光感應模組的類比數值,並顯示在串列埠監控視窗。
光感應模組的介紹請參考 [模組介紹 : faya光感應模組]
校正指針位置範例程式:
備註:
- 光感應模組的程式控制原理,請參考 [模組介紹 : faya 光感應模組]
- 步進馬達模組的程式控制原理,請參考[模組介紹 : faya 步進馬達模組]
- L40~43 : 開機後指針會順時針旋轉,當指針遮到光感應模組時,類比數值會低淤550 (可根據環境修改此數值),此時指針不再移動,停在光感應模組上方,也就是指向晶片南方。
- L45: 馬達順時轉一圈需要2048步,因此逆時轉半圈需要-1024步
校正步驟 :
(1) 開啟串列埠監測視窗,利用一字起子調整可變電阻,改變輸出類比數值 CDS Value
(2) 當光感應模組還未被指針遮住時,CDS Value 大約介於800~850
(3) 當光感應模組被指針遮住時,CDS Value 需低於550門檻值
以上是針對筆者的環境進行的調整,由於每個環境的光線強度不同,因此CDS Value也會不同,大家可以自行斟酌調整第43行的550門檻值,並搭配調整可變電阻,最終目的是要讓指針旋轉到光感應模組時,自動停下來即可。
校正結果:
主範例程式:
底下為動力羅盤的程式,如果沒有先經過之前的校對過程,直接執行底下的程式也可以,此時由於沒有光感應數值顯示於串列監控視窗,因此必須靠感覺調整光感應模組的可變電阻,直到步進馬達指針第一次順時針旋轉時,會自動停在光感應模組上方。
備註:
- 程式主要由三部份組成,L46、L47、L56,其中L46和L47只需要執行一次,因此放在Setup()區域,L56必須重複執行,因此放在Loop()迴圈。
- L46 motorCalibration() : 校正指針,使其指向晶片北方,這部份我們在上一段解釋過了
- L47 motorToNorth () : 讓指針由晶片北方轉到磁北方
- L56 traceNorth() : 讓指針持續指向磁北方
- L71~90: motorToNorth副程式,由於我們已經先執行了motorCalibration()副程式,讓指針指向晶片北方,這段副程式能夠讓指針由晶片北方經過最小角度(最短路徑)轉到磁北方。
-L74、L80: 我們將磁北方與晶片北方的夾角我們儲存在heading_new變數內,由於此夾角是以磁北方為起點,順時針方向計算與晶片北方之間的夾角度,因此為了達到最短路徑旋轉到磁北方,我們設了大於和小於180度的判斷
-L74~L79: 下圖中N代表磁北位置,如果 heading_new大於180度,指針只要繼續順時針旋轉 (360-heading_new)的角度即可指向磁北方,也就是下圖中的綠色路線 (最短路徑)。

-L77~78: 步進馬達走一圈(360度)需要2048步,因此我們可以用map()函式算出(360-heading_new)角度所要走的步數,又由於是順時針旋轉,因此78行裡面的步數是正的。步進馬達的原理可以參照 [模組介紹 : faya步進馬達模組]
-L80~85: 下圖中N代表磁北位置,如果heading_new小於180度,指針只要逆時針旋轉heading_new的角度即可指向磁北方,也就是下圖中的藍色路線 (最短路徑)。

-L83~84: 步進馬達走一圈(360度)需要2048步,因此我們可以用map()函式算出(heading_new)角度所要走的步數,又由於是逆時針旋轉,因此84行裡面的步數是負的。步進馬達的原理可以參照 [模組介紹 : faya步進馬達模組]
- 截至目前都在解釋馬達指針在setup()區域所完成的兩個動作 (1) 指針校正,使其自動指向晶片北方,(2) 指針指向磁北方。接下來,我們在loop()迴路中,要處理當偵測到羅盤有任何移動或轉動的時候,Arduino會根據轉動的角度,馬上修正使指針依然指向磁北方,這段功能寫在traceNorth()副程式中。
- L102: heading_new是紀錄最新的方位,heading_old是上一筆的方位,當羅盤都沒有移動或轉動時,heading_new = heading_old,但是當轉動時,兩者差距會改變,此時程式進入迴圈,讓馬達轉動修正方為使指針轉回磁北方。使用絕對值函數abs()可以一次偵測到順逆方向的旋轉變化:
- 當順時針旋轉羅盤時,heading_new 會大於 heading_old
- 當逆時針旋轉羅盤時,heading_new 會小於 heading_old
-L104、L124: 跑完setup()裡的指針的 motorToNorth () 後,指針會指著磁北方,並把最後的晶片位置儲存到headling_old變數裡。當我們轉動羅盤時,馬達指針會被羅盤帶動,瞬間偏離磁北,為了讓馬達能夠用最短的距離轉回到磁北 (順時針或逆時針),我們必須先知道晶片最後位置在那一個方位。 下圖中N是磁北方,也就是馬達指針指的方位, 當我們旋轉羅盤時,會有以下四種狀況產生
- 順時針旋轉羅盤,指針瞬間停在I/II象限(轉180度內),我們讓馬達逆時針轉回磁北即為最短距離
- 順時針旋轉羅盤,但是轉的速度很快,指針瞬間停在III/IV象限(轉超過180度),此時讓馬達繼續順時針轉回磁北即為最短距離
- 逆時針旋轉羅盤,指針瞬間停在IV、III象限(轉180度內),此時我們讓馬達順時針轉回磁北即為最短距離
- 逆時針旋轉羅盤,但是轉的速度很快,指針瞬間停在II/I象限(轉超過180度),此時讓馬達繼續逆時針轉回磁北即為最短距離。

為了處理以上四種狀況,必須先了解最後晶片北方的位置(heading_old),再進行分類處理,個別解釋如下
-L104、L106~L111 : 當最後位置heading_old落在第I,II象限(L104),且羅盤旋轉角度小於180度時,這時候heading_new會落於下圖藍色線條區域 (L106),此時只需要讓步進馬達逆轉heading_new和heading_old角度差(L108),即可讓指針以最短距離回到磁北(L109~L110)。

如果是落於褐色區域(L114),只需讓步進馬達繼續順時針轉回heading_old位置,也就是 (360-heading_new)+heading_old (L115),即可讓指針以最短距離回到磁北(L119~L120)。
如果是落於褐色區域(L116),只需讓步進馬達繼續順時針轉回heading_old位置,也就是heading_old-heading_new (L117),即可讓指針以最短距離回到磁北(L119~L120)。

如果是落於粉紅色區域(L128),只需讓步進馬達逆時針轉回heading_old位置,也就是 heading_new-heading_old (L129),即可讓指針以最短距離回到磁北(L133~L134)。
如果是落於橘色區域(L130),只需讓步進馬達逆時針轉回heading_old位置,也就是(360-heading_old)+heading_new (L131),即可讓指針以最短距離回到磁北(L133~L134)。

-L124、L136~L141 : 當最後位置heading_old落在第III,IV象限(L124),且羅盤旋轉角度大於180度時,這時候heading_new會落於下圖紫色線條區域 (L136),此時只需讓步進馬達繼續順時針轉回heading_old位置,也就是heading_old-heading_new(L138),即可讓指針以最短距離回到磁北(L139~L140)。

結果演示:
影片解釋:
5秒處 : 馬達指針遮到光感應模組,代表指針指向晶片南方,步進馬達停止前進
8秒處 : 馬達逆時針全轉180度,讓指針指向晶片北方
12秒處 : 馬達指針指向磁北方
14秒處 : 手機裡的電子羅盤app顯示的磁北方向和馬達指針所指的方向一致
16秒處 : 傳統的指北針指的北方也和馬達指針所指的方向一致
17~29秒處 : 無論順時或逆時旋轉羅盤,三個裝置的指針方向皆一致,維持指向磁北方
31~34秒處 : 校正手機方位,讓指北針指向外圍文字的北方
35~39秒處 : 校正羅盤方位,讓羅盤指針指向積木的N
43~44秒處 : 校正傳統指北針,讓指針指向外圍文字的N
48~53秒處 : 三個裝置的南方(S)皆一致
54~1:00處 : 三個裝置的東方(E)皆一致
討論:
以下是我們開發此創意組合時得到的經驗,大家可以參考參考
- 當馬達指針順時針往光感應模組轉動時,由於光源強度與角度的不同,有可能會提早遮到光感應模組,造成馬達指針沒有真正只到晶片南方,遇到此現象,大家可以在程式L63-64之間插入一行 fayaStepper.step(20); ,讓步進馬達多走幾步,使其完全的指向晶片南方位置。
- 此羅盤最終指向的方位是北方,如果想要做指南針,則將程式65、66行刪除,讓一開始校準的方位指向晶片南方即可。
- 和傳統羅盤一樣,如果周邊有磁力裝置,例如手機或喇叭,會影響到羅盤感應磁北的方位,降低感應準確性。
歡迎大家在底下留言或到我們的粉絲團留言喔!
====================================
fayalab 粉絲團
FB本篇留言版



沒有留言:
張貼留言